Continuing on from my last post concerning optimisation and Lagrange multipliers, I came across a neat little paper on the arXiv here, which asks and answers the question: what shape should a planet be to maximise the gravitational force at a given position? This is a fun problem, solved using an extension of the techniques from the last post, namely the use of Lagrange multipliers to optimise a function given some constraint.
Let’s set some things down before we begin. Assume in the diagram below that we are stood at the pole of an arbitrarily-shaped planet, marked with the red dot. By symmetry, the planet will be cylindrically symmetric, but may have a varying profile. We should then use a cylindrical coordinate system to describe the surface of the planet – call this radius 

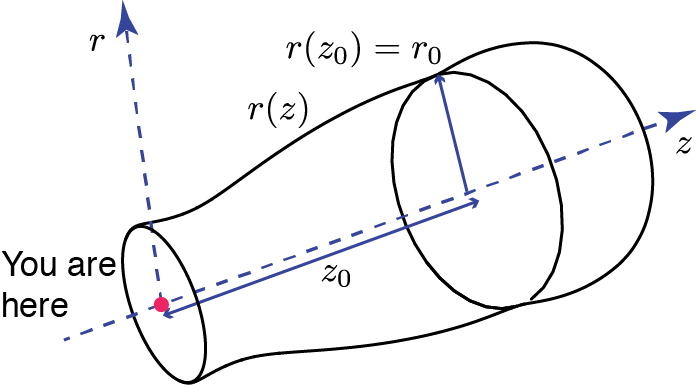
We want to calculate the total gravitational force caused by a planet of this shape at our position. To do this, let’s split up the planet into a series of disks. Suppose the disk at a distance 




It has dimensions 



or equivalently the acceleration

Finally we should include the fact we only need the 


The total acceleration is then given by integrating over 


To get the force from the entire planet then, we continue this integration to the rest of the

Now we’ve defined in our co-ordinate system that we’re standing at the origin, so the planet must begin at 



Now this looks familiar – if we want to optimise something subject to a constraint, we should aim to optimise some linear combination of the quantity of interest and the constraint. In this case we should be optimising
![L[r(z)] \equiv A[r(z)] - \lambda M[r(z)] = \int_0^{z_1} \mathcal{L} dz](https://s0.wp.com/latex.php?latex=L%5Br%28z%29%5D+%5Cequiv+A%5Br%28z%29%5D+-+%5Clambda+M%5Br%28z%29%5D+%3D+%5Cint_0%5E%7Bz_1%7D+%5Cmathcal%7BL%7D+dz&bg=ffffff&fg=333333&s=2&c=20201002)
where 


Now in the above I’ve been notating these objects with square brackets to distinguish them from functions. Functions take a number and return another number. These things are functionals, which take a function and return a number. We are now trying to find a function which minimises a functional.
From the Euler-Lagrange equation we know that in order to find an extremum of this functional, the required function

where 


We can rearrange this expression to get our planet’s shape:

Now we’re almost done – we just need to fix the unknowns 

We can then substitute everything into our equation for the mass of the planet:

Finally, we have a complete solution, which is plotted below along with a spherical planet of the same mass.
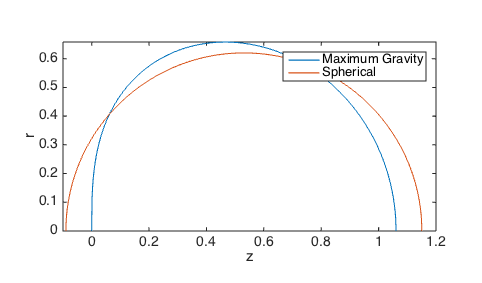
We have fixed the mass and density of our planet, and we may notice that we have implicitly defined a lengthscale 


In this co-ordinate system the equation of a perfect sphere would be

so the act of maximising the gravitational force has squashed a circular planet up towards the observation point, by modifying the exponent of the first term in the equation for
Lets draw this planet a little more intuitively, in these normalised coordinates:
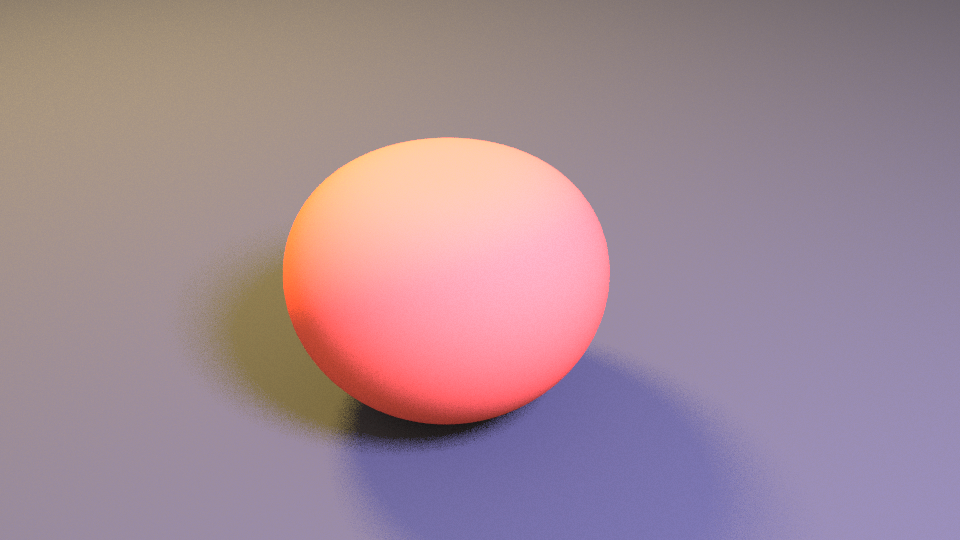 Here I’ve written a Python script for Blender to create and light the correct geometry. The
Here I’ve written a Python script for Blender to create and light the correct geometry. The 
I’d like to be able to generalise this model to explore different planetary shapes. A simple thing to do is to see what happens when we change the way gravity spreads out. The current model for gravity suggests an inverse-square law, so the force exerted by a mass scales with radius like 






I’ll leave those derivations as an exercise for the terminally bored (it’s simple and only a little tedious). What’s interesting to do is scale the dimensions is each case by the appropriate lengthscale 
 It’s important to note that each frame is using a different spatial scaling – in each case the planet has the same volume and mass, but they’ve all been scaled uniformly to fit into the same vertical region.
It’s important to note that each frame is using a different spatial scaling – in each case the planet has the same volume and mass, but they’ve all been scaled uniformly to fit into the same vertical region.
Switching back to unscaled coordinates, we can see below how the profile of the planets change when gravity operates in different dimensions.
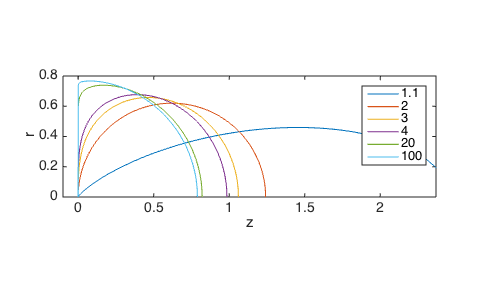
For 
For higher dimensions, gravity lessens incredibly rapidly with distance so it’s most important to squash as much mass as close to the observer as possible. This leads to the planets becoming a half-sphere shape.
Now this is all very nice, but there is one thing we’ve overlooked, which becomes clear when we actually work out the gravitational force caused by these different planets:

For 

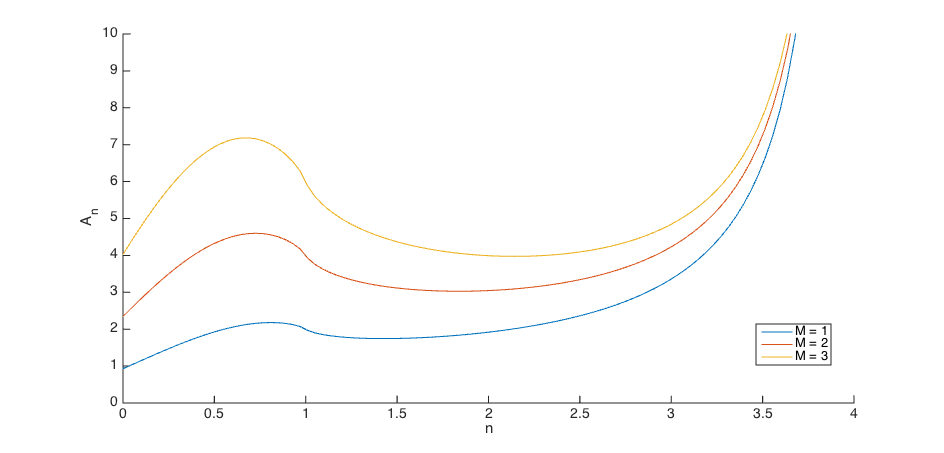 For sufficiently massive planets, the gravitational force in lower dimensions can exceed that from a 3-dimensional gravity. While this solution continues for
For sufficiently massive planets, the gravitational force in lower dimensions can exceed that from a 3-dimensional gravity. While this solution continues for 
Nevertheless, from a simple question we’ve managed to churn out a lot of maths and even a Python script. If you’d like to have a look, you can see it here.
In Blender if you’d like to run the script, open a new .blend file, ensure the selected render is Cycles, open the Python console, and type
filename = 'SCRIPTLOCATION' exec(compile(open(filename).read(), filename, 'exec'))
There is a line commented out at the end of the script where you can choose where to save the finished render. The rest should be self-explanatory, though if you have any questions feel free to comment below.
