Sitting in traffic in the middle of London gives you a lot of time to think. Here’s a fun problem born entirely of frustration sat waiting to cross the Hammersmith bridge.
Let’s play a thought experiment. You, dear reader, are a highways technician tasked with installing a new speed bump on a road near your house. Your boss has given you a precise volume of concrete to use, but you know you’ll be going over this bump often enough that it will be a problem. Given your load of concrete, what shape should you make the speed bump to minimise your misery?
Let’s break it down. You’re in a car going at horizontal speed 




Some things we can deduce – your speed at any point is determined by the shape of the curve 

If we also assume that the car wheel stays stuck to the speed bump, then the angle your velocity vector makes with respect to the ground at any point is given by

and the velocity in the 



With these ground rules laid down, let’s turn to what we should be optimising for. The thing that makes speed bumps unpleasant is the amount of vertical acceleration – that’s the jolt you feel as you go over one.
We’d like to minimise acceleration in the

and then minimise it.
The problem is that we don’t have 

Note that the time it takes the car to move horizontally 


Using the shorthand 

You might be thinking that this isn’t a particularly elegant looking formula to work with, and you’d be absolutely right. To continue with the analytical effort (as opposed to numerical – see later), let’s start approximating.
First, most speed bumps satisfy 

Secondly, the slope of the bump will be assumed to be weak so 

Plugging these assumptions through, and converting the integral over time into one over position, we end up trying to minimise the following integral:

The mathematically astute amongst you will realise that the trivial solution is to have 

Of course, we’ve forgotten to include the fact that the cross-sectional area of the speed bump needs to stay fixed, or
This is a constraint on the minimisation problem, and must be included.
The generic way to include such constraints is to minimise a linear combination of the problem and constraint, i.e. we should minimise

where 
To actually do the minimisation, note that the end points of the integral are fixed, and the solution we are trying to find is a simple scalar function of the integration variable, in which case the answer comes from the Euler-Lagrange formula. Writing the integral as

the solution is given by

or explicitly in this case
This is pleasingly simple! The general solution is a 4th-order polynomial

which we need to apply some boundary conditions to to find.
Firstly, let’s make the speed bump symmetric, so the odd powers disappear.
Secondly, let’s enforce that 
Finally, let’s make the area under the curve from 

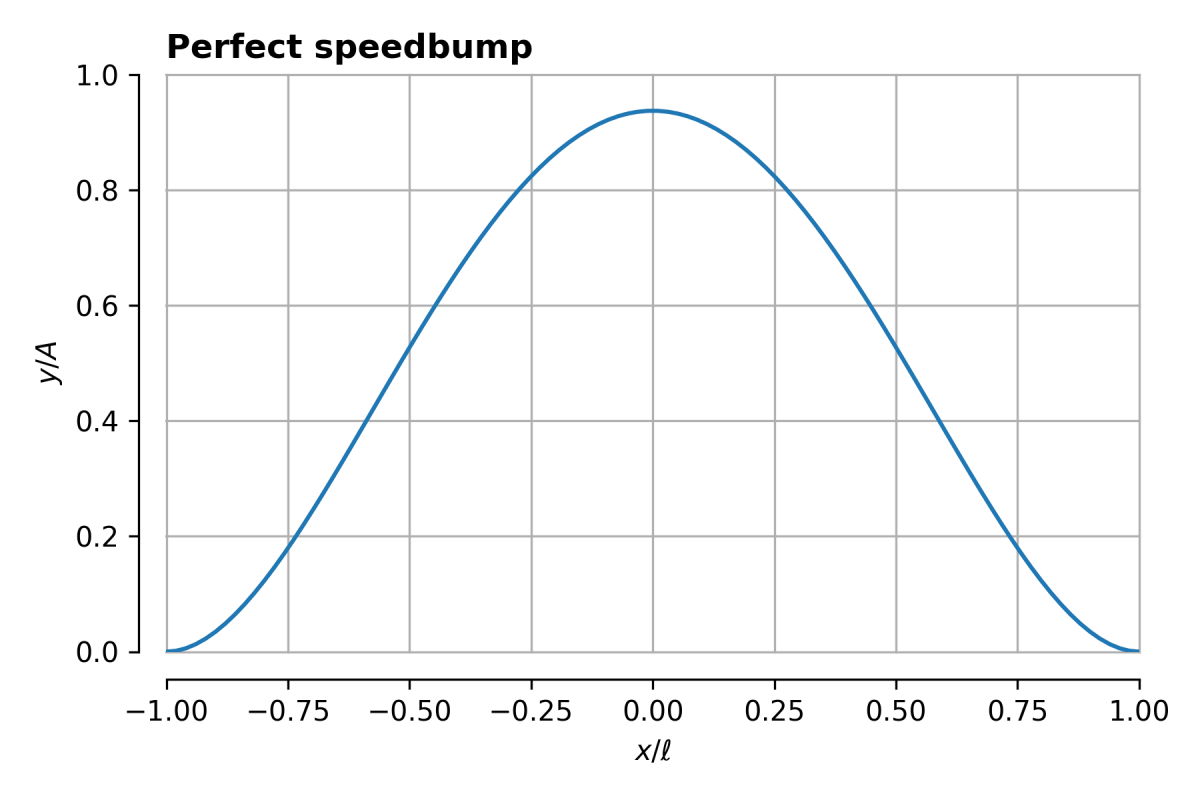
Then the solution is

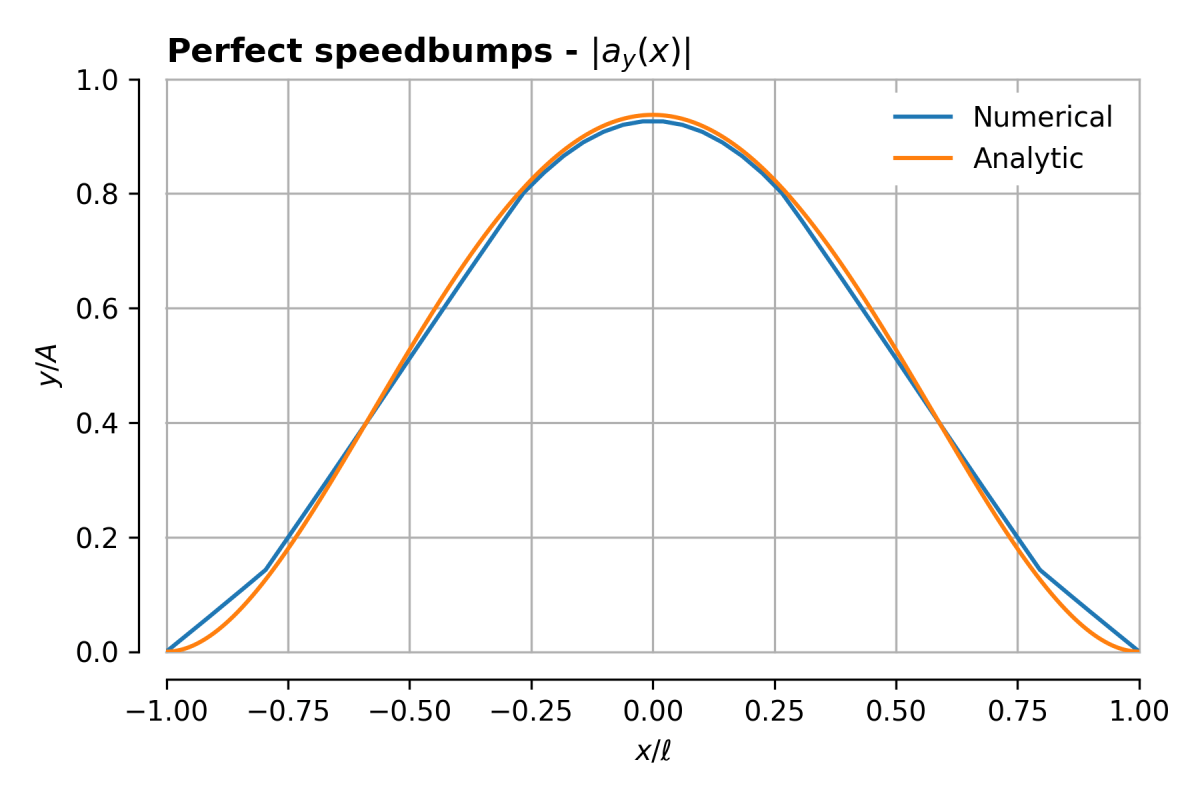
or plotted,
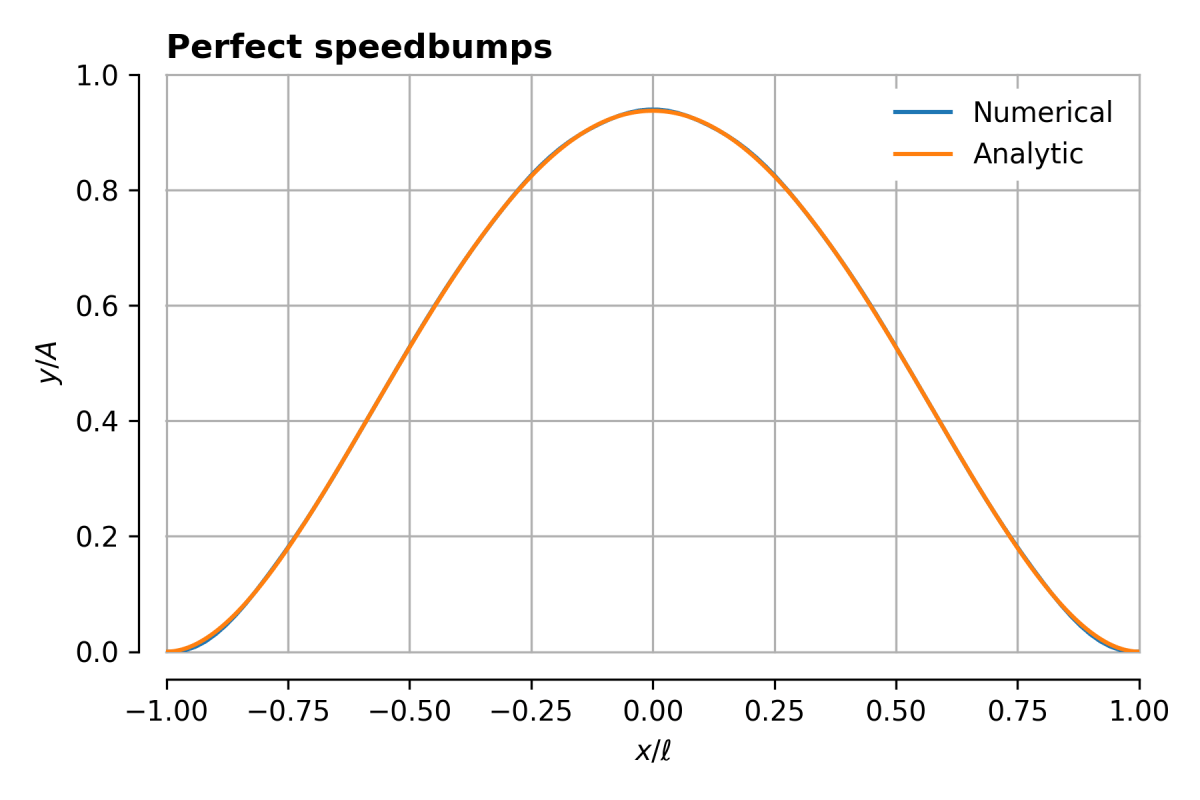
While it is always very pleasing to come up with a simple analytical solution to a problem, we should remember that this is only an approximation. Is it possible to do better than this going beyond pen and paper?
I had a decent go at this, writing a gradient-descent optimiser which started with the analytic shape and optimised according to the exact equations above. The results were… not very different. You can see below that the optimal shape is slightly flatter at the edges and slightly taller overall, but otherwise very close to the solution we already found.
Being a numerical method, it is simple to change some of the other assumptions above. What if we minimise the integral of 

I’m quite fond of this post as it managed to generate a fair amount of work from an observation I’m sure many people have idly made while stuck in traffic. As the great Adam Savage once said, the only difference between science and mucking about is that science is written down. I think this post therefore qualifies!

One could argue that the aim of a speed bump is to limit the maximum speed of cars going over it. Would it be possible to search for a solution that would have minimal cost below the speed limit but increase very rapidly once you reach this value ?
LikeLike
You’ve been reading the literature! This seems to be exactly what people have thought about before, e.g.
https://www.tandfonline.com/doi/abs/10.1080/08905459708945498
The solution ends up looking like a double-hump, presumably exploiting the resonance characteristics of the car-wheel system modelled in that paper.
LikeLike
I had a go at maximising for y acceleration, just for fun. I wound up with a crazy high order non-linear ODE and left it there. I wonder if the double-hump is a solution for the ODE.
Great post. I very much enjoyed it.
LikeLike
Presumably there is no maximum for the average acceleration – just keep making the solution spikier? If you have something set up though, it’s fun to try different boundary conditions, i.e. bump heights and slopes at edges. In particular, if you don’t constrain the derivative at the edges, you end up with something that looks a lot like part of a sinusoids.
LikeLike
Two small remarks: , the last equality is incorrect: you miss the initial
, the last equality is incorrect: you miss the initial  factor to the rightmost part ;
factor to the rightmost part ; sign before the second derivative
sign before the second derivative  part.
part.
* in your first equation for
* the general equation you give for the Euler-Lagrange equation is not correct: the signs should alternate, that is it should be a
Note that none of that change the overall results and other equations of this post.
LikeLike
Thanks for the comments! I must admit, I spotted the first of your points and assumed no one would notice – thank you for proving we wrong 🙂 On the second, thanks for the correction. I last studied the calculus of variations ~8 years ago, but that’s no excuse for sloppiness!
LikeLike
This is awesome.
Another way to numerically solve this would be to use a single step of reinforcement learning with actor critic. The agent outputs a curve shape (e.g. 100 floats). The critic learns to approximate the utility function. The gradient from the critic is pushed into the actor to maximize utility. The ground truth reward is generated by numerically evaluating the shape possibly using a physics simulation.
LikeLike